
Robot Arm vs Humans
ロボットアームを真似て得点を稼ぐミッション型ゲーム
background / concept
カナダのケベックで行われたUIST 2017・Student Innovation Contestにてデモを行なった作品。
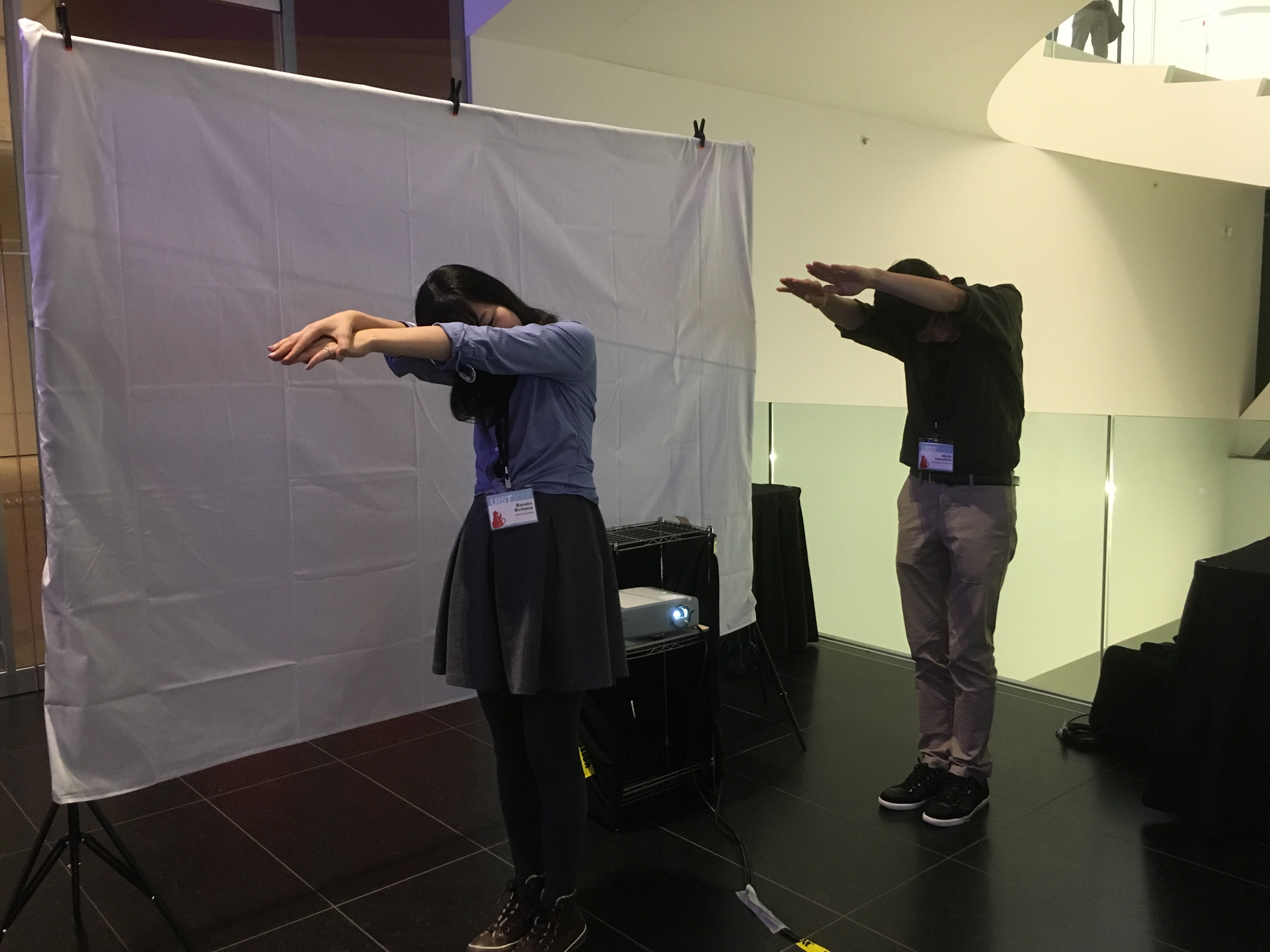
ロボットアーム本体の形に注目し、Mission in Posing という二人用ミッション型ゲームを提案し実装、現地でデモを行いました。プレイヤーがBraccioの形を正確に真似ることで各ミッションをクリアし、それによって次のステージに進める構成になっています。このゲームを通じて、プレイヤーは普段のロボットアームの動作が人間にとっていかに複雑で難しいかを体感するものとなっています。
ロボットアーム本体の形に注目し、Mission in Posing という二人用ミッション型ゲームを提案し実装、現地でデモを行いました。プレイヤーがBraccioの形を正確に真似ることで各ミッションをクリアし、それによって次のステージに進める構成になっています。このゲームを通じて、プレイヤーは普段のロボットアームの動作が人間にとっていかに複雑で難しいかを体感するものとなっています。
implementation
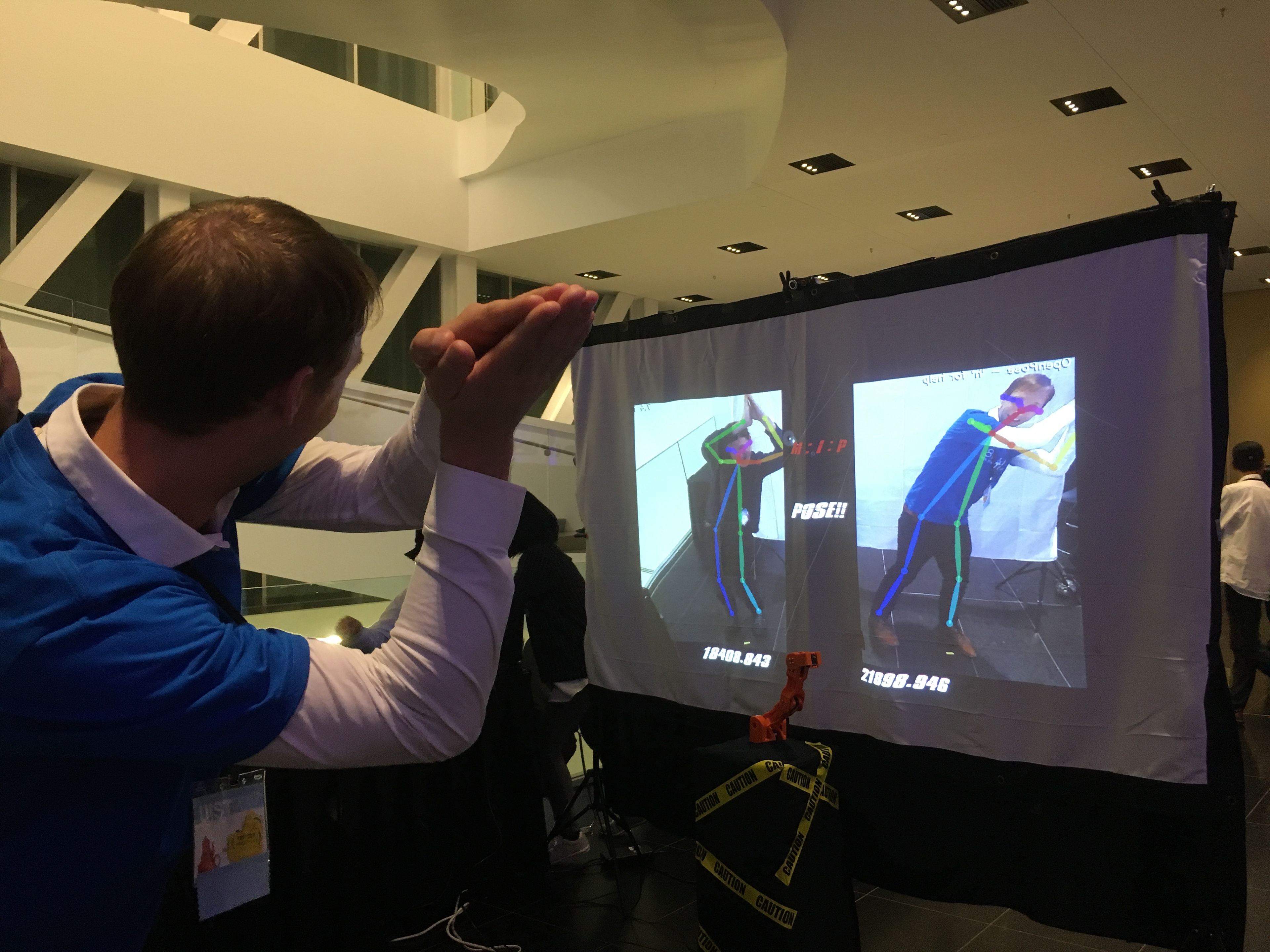
ロボットアーム側はArduinoで制御。プレイヤー側はOpenPoseという複数人の骨ジョイントをリアルタイムで特定することができるライブラリを使用しBraccioとの整合性を算出し、その整合性によりポイントが加算されていきます。最終的にポイントの高かった方が勝ちというシンプルなゲームです。
credit
Yuki Kozasa - Planning / Engineering
Marina Yamashita - Planning / Space Design
Haruka Kodama - Planning / Game Design / Graphic Design
HOW TO PLAY
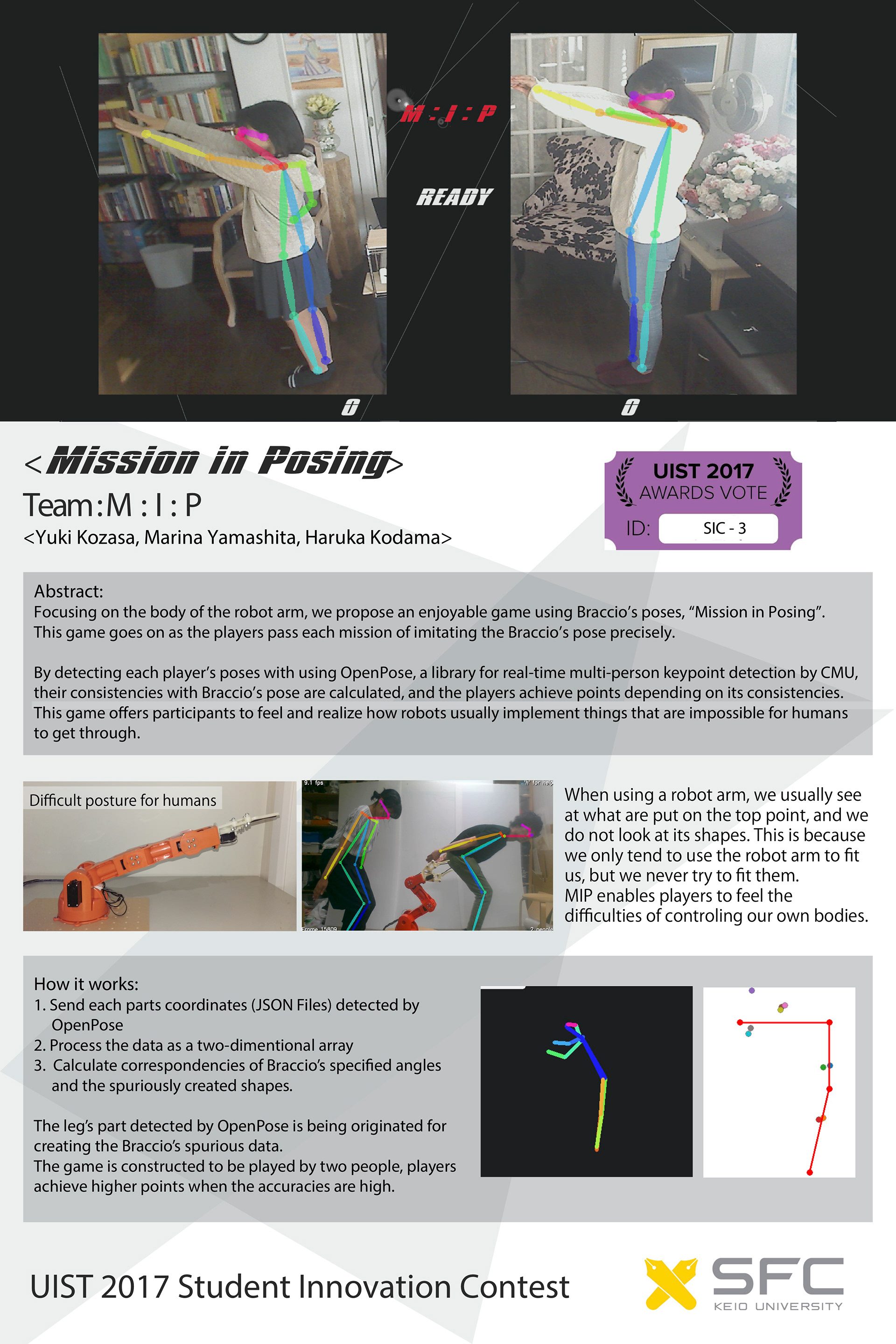
UIST 2017 SIC POSTER
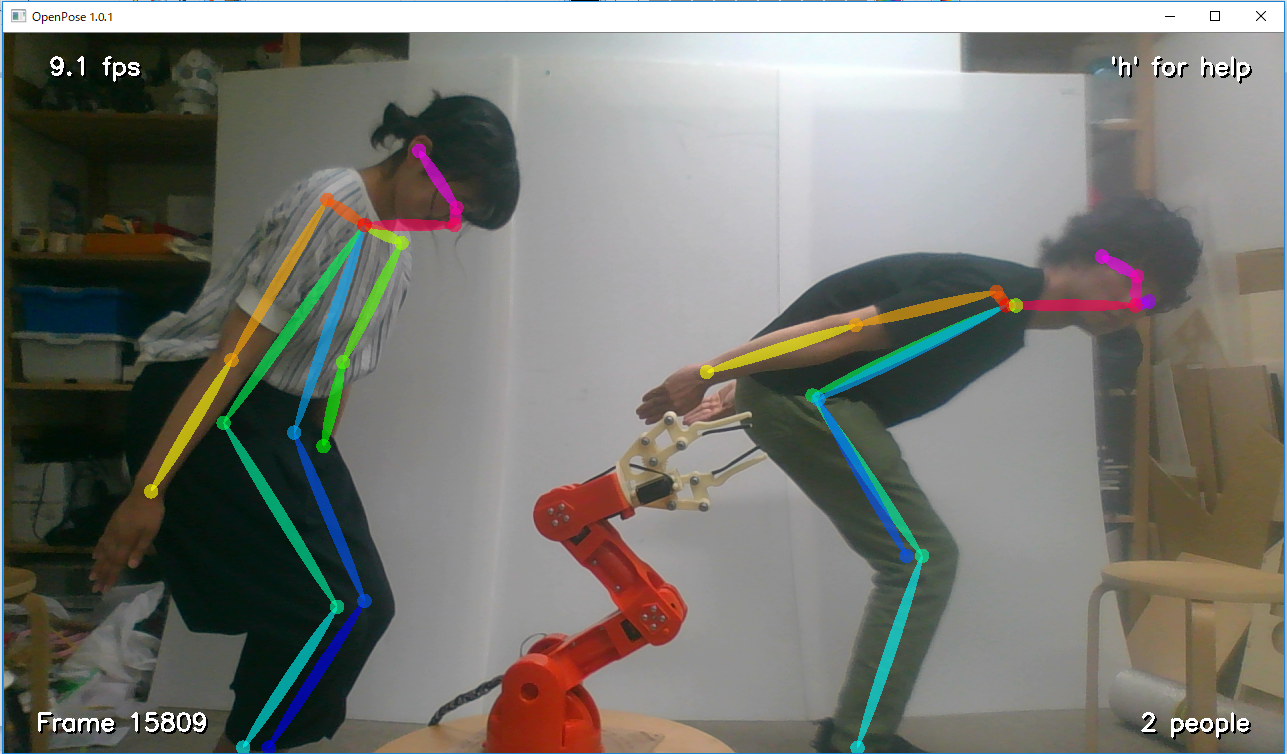
openPoseでの人骨認識